Product Information
Solutions
Technical Information
Motor Sizing
Downloads
Virtual Showroom
Contact Us
Stepper Motors > Stepper Motor Drivers > DC Input Stepper Motor Drivers > 5-Phase Stepper Motor Drivers - CRD
CRD 5-Phase Stepper Motor Drivers (DC Input)

CRD 5-Phase Stepper Motor Drivers
The CRD 5-Phase Stepper Motor Driver with Built-in controller, Stored Data or Stored Program type, is a space saving, 5-phase driver / controller for New Pentagon type 5-phase stepper motors. The Stored Data type is network compatible and works with the FLEX products line for connectivity while the Stored Data type features advanced programing options. Both types support the lowest vibration through the use of a 5-phase motor, advanced microstepping control and are feature rich with many control options.
- Stored Data (Network) or Stored Program Type
- 5-Phase, Low Vibration, Microstepping Driver
- Space Saving
- 24 VDC / 0.35 ~ 1.4 A


Stored Data (Network) Type Driver with Built-in Controller
Space Saving, Reduced Wiring
Since a pulse generator is not required and the driver is also compact, space saving and system simplification are achieved.
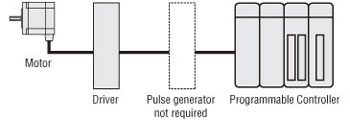
The compact driver with built-in controller saves space.
The driver can be mounted on a DIN Rail.

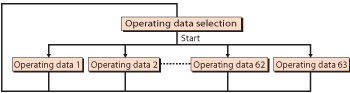
Maximum 63 Points of Operating Data
Up to 63 points of operating data can be set in the driver. Setting of incremental (relative-distance specification) mode and absolute (absolute-position specification) mode for each data is possible.
Operating data is set with either the accessory control module OPX-2A (sold separately), the data setting software MEXE02, or RS-485 communication.
Positioning Operation
The motor's operating speed and traveling amount are set in the operating data and operations are performed in accordance with the
selected operating data.
Linked Operation
If the operating data is set to "linked", continuous positioning with the
following data number is possible with one START signal.
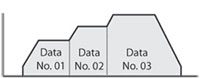
[Linked Operation]
If data No. 01 is selected and the START input, linked driving from data No. 01 to No. 03 is performed without the motor stopping.
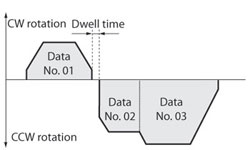
[Linked Operation 2]
If data No. 01 is selected and the START input, the data No. 01 operation is executed. After that, it is stopped for only the set dwell time1 and then the operations from data No. 02 to No. 03 are executed. Operating data with a different rotation direction can also be linked.
1Dwell time is the wait time until the next position operation starts.
Sequential Operation
If the operating data is set to "sequential positioning", positioning of the next data number is performed in sequence every time a START signal is input.
PLS-OUT Output Function
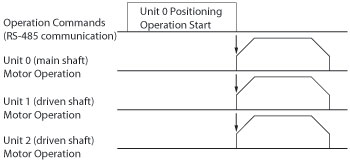
Synchronous Operation is Possible
A signal with the same pulse number and pulse speed as the command value is output. A PLS-OUT signal and DIR-OUT signal (rotation direction signal) are input into another driver, allowing a motor on a separate axis to be driven.
Used for Position Counting
The command position to the motor can be confirmed by counting the output signals.
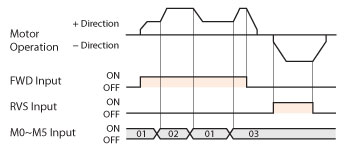
Speed Control Operation
The motor operates continuously while a FWD signal or RVS signal
is input. Because it operates at the speed of the operating data
set beforehand, multistep speed-change operation is possible by
changing the data number.
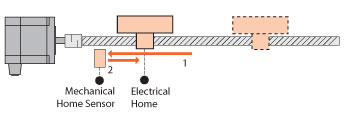
Return to Home Operation
Equipped with a sequence for return-to-home operation that reduces
the burden of the host (master controller) and the hassle of combining
programs or sequences. A separate sensor is required.
Group Sending Function
Groups can be configured with multiple axes connected via RS-485
communication or network converter and commands can be sent for each group. Multi-axis simultaneous starting and identical operations are also possible.
Encoder Type Motors
Motor rotations can be detected by receiving encoder feedback directly to the built-in controller.
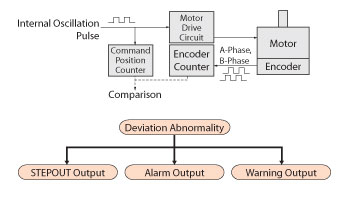
STEPOUT Output Function
If the deviation between the driver command position and encoder counter value reaches the setting value (deviation abnormality), a STEPOUT signal is output. Positional errors for example due to rapid changes in load can be detected.
Alarm Output Function*
When a deviation abnormality occurs, an overflow alarm is generated and the motor is stopped.
Warning Output Function*
When a deviation abnormality occurs, an overflow warning is generated. The motor continues to operate.
*Parameters can be set so an alarm or a warning is output when a deviation abnormality has occurred.
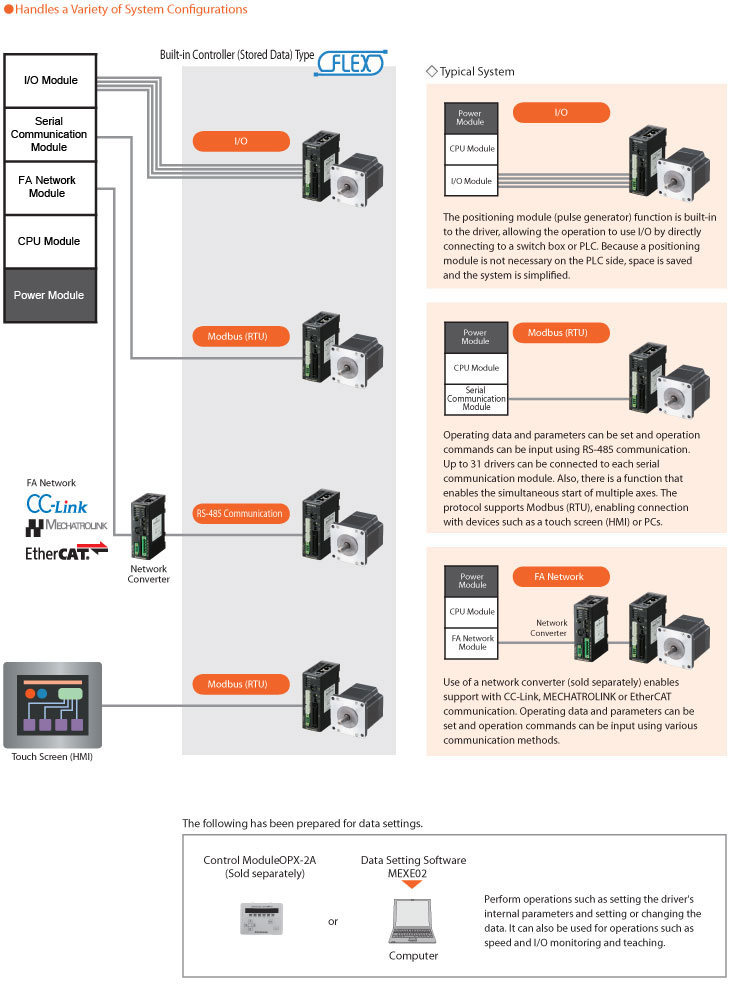
Equipped with an Interface that Connects to Various Master Control Systems
FLEX is the generic name for products that are used for Factory Automation (FA) network control via I/O control, Modbus (RTU) control, or a network converter.
FLEX products enable easy connection, easy control, and reduce the complexity of system configuration.
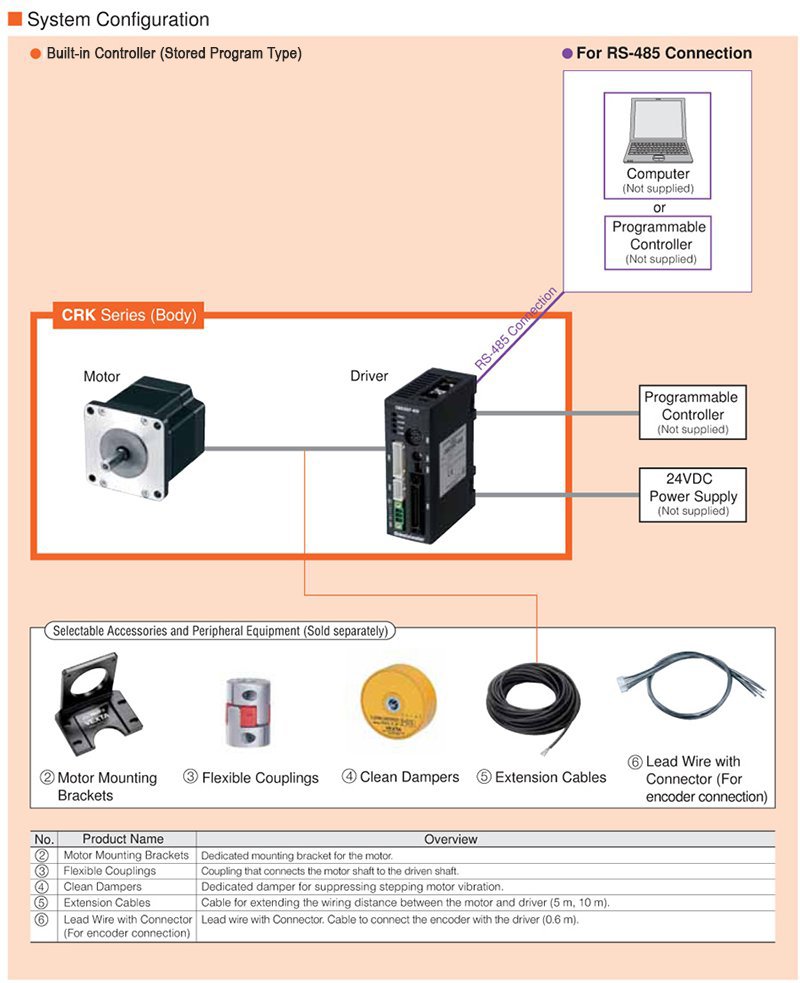
Stored Program Type Driver with Built-in Controller
Features of the Built-in Controller
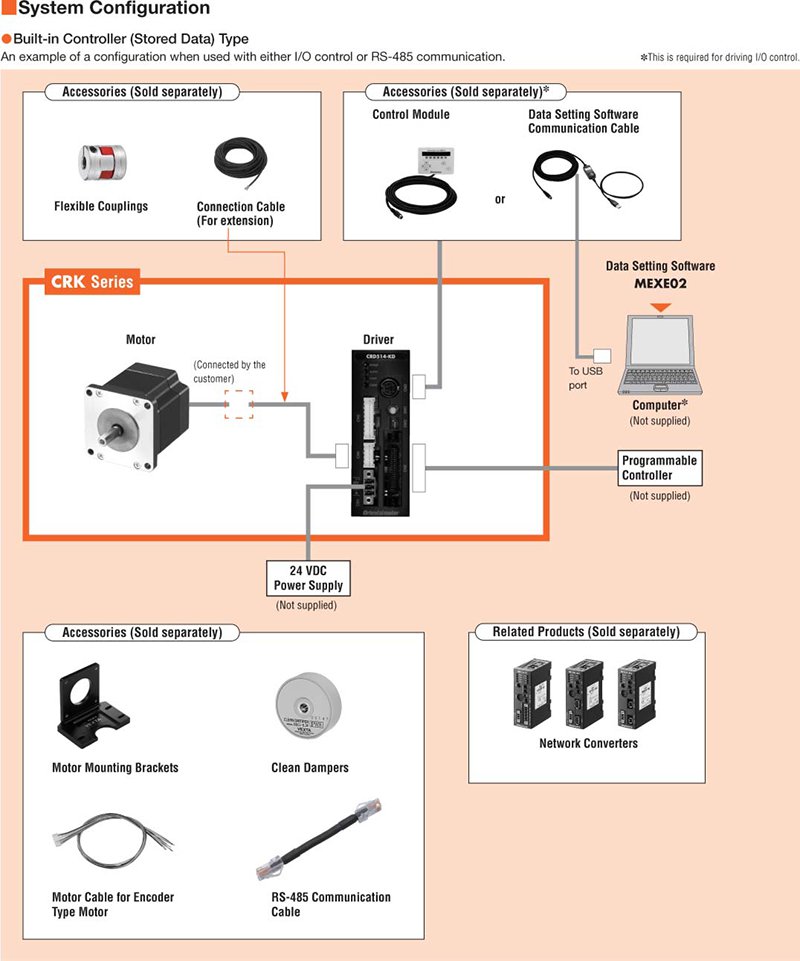
The CRK Series with built-in controller is a compact, space saving stepper motor and driver package with a powerful, feature-rich controller built-in. The driver supports RS-485 communications with mult-drop capability for network operation and I/O control.
The compact driver with built-in controller saves space.
The driver can be mounted on a DIN Rail.
Up to 64 Program Sequences
Up to 64 Program sequences are available. Incremental (relative distance specification) mode and Absolute (absolute position specification) mode are available.
3 Operating Modes
- Direct Command - entry from terminal, PLC or master controller
- Stand Alone Operation - running stored programs selected via I/O
- Variable Data - any settable parameter or variable values entered/changed via direct entry from a host will be used by the stored sequence.
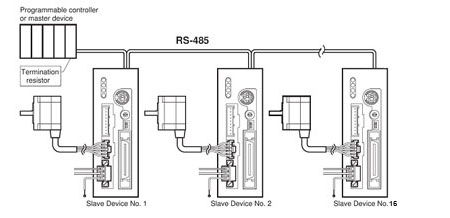
RS-485 Communications
- Multi-drop up to 16 units
- PLC or PC based programming
- Warning, Error and Alarm detection
Motion Profile Examples
- Repetitive positioning
- Stop via sensor Input
- Continuous operation at variable speeds
- Linked motion, up to four maximum
- Mechanical or Electrical Return to Home
- PLS-OUT function - Drive a second driver with the same pulse count as the first motor.
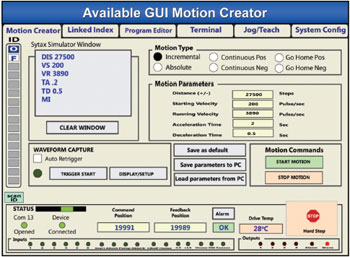
Motion Creator Software (GUI)
- Easily create basic motion such as Incremental, Absolute, Linked and Continuous moves
- Use Program Editor to create complex motion profiles
- Utilize commands from built-in editor with drag and drop
- Easy cloning with Upload/Download functions to PC
- Use Motion Monitor to view all inputs, outputs, motor position and alarm state
- Built-in Help Menu
Return to Home Operation
Return to Home Operation can easily be performed by a home position sensor or a sensor representing a position reference point (home) is available.
PLS-OUT Output Function
Synchronism is available
The PLS-OUT output is used to output the driver's internal oscillation pulse to a second driver allowing for the second motor to be controlled in synchronism with the first. The number of pulses to the output corresponds to the commanded travel and the pulse frequency corresponds to the operating speed.
Used for Position Counting
By counting the output signals, the commanded position of the motor can be checked.
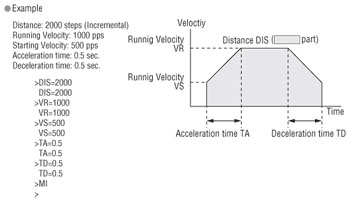
Motion Examples
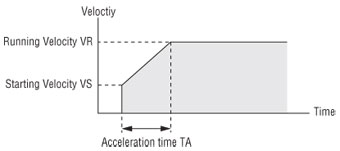
[Incremental Operation]
The motor's operating speed and distance of the move are set to perform according to the selected program.
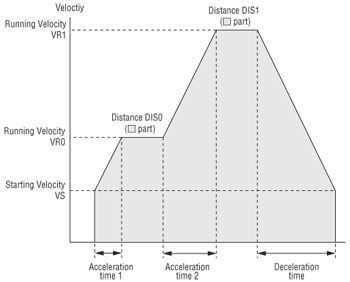
[Linked Operation]
Use up to 4 running speeds between the start and stop positions with each motion having its own distance. After "linking" the data, the different motions will be activated with a single start signal.
[Continuous Operation at Variable Speeds]
The motor speed can easily be changed while the motor runs continuously with a new motion command.
Encoder Type Motors
Motor rotations can be detected by taking in encoder output signals into the built-in controller.
STEPOUT Output Function
If a deviation between the driver's command position and the encoder counter value reaches the setting value (deviation abnormality), a STEPOUT signal is output. This allows for detection of positional errors caused by sudden changes in load, etc.
Alarm Output Function*
If a deviation abnormality occurs, an overflow alarm is generated and the motor is stopped.
Warning Output Function*
If a deviation abnormality occurs, an overflow warning is generated. The motor will continue to operate
*Whether an alarm or warning is output when the deviation has occurred can be set in the parameters.
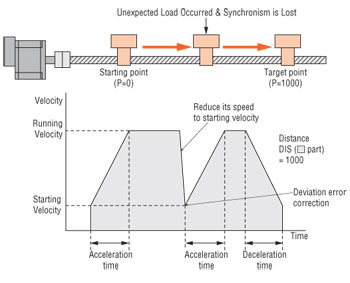
Self Correction Function
When the Self Correction Function is enabled and synchronism is lost, the controller makes sure that the motion profile is completed correctly. Total distance remains the same.
PKP Series 5-Phase Stepper Motors

The high-torque PK/PKP series stepper motor offers balanced performance enhanced by high torque, low vibration and low noise.
- 0.72° (500 pulse/rev) & 0.36° (1000 pulse/rev)
- Wide Range of Gear Types for Inertia Matching & Higher Torque
- New Pentagon Winding
- Encoders - 500 or 1000 Lines of Resolution
- Electromagnetic Brake Type
Network Gateways

The communication protocol of the master controller, Factory Automation (FA) network, is converted to Oriental Motor's own RS-485 communication protocol. Connection to Oriental Motor's network compatible products is completed with one RS-485 communication cable.
- Compatible Networks:
CC-Link, MECHATROLINK-II, MECHATROLINK-III, EtherCat
*For use with Stored Data (Network) type
![]()
![]()
![]()
Control Options - Control Module

The internal driver parameter settings and data settings can be established and changed. They can also be used for speed and I/O monitoring, teaching, and so on.
*For use with Stored Data (Network) type
Control Options - Data Setting Software

This communication cable is required for connecting to the computer on which the data setting software is installed.
*For use with Stored Data (Network) type
RS-485 Communication Cable

These cables are used to link drivers when a built-in controller type is being operated in a multi-drop manner.
System Configuration
CAD / Manual Search
To locate product CAD and Operator Manuals please search using the product Item Number.
Downloads
Videos
Technical Articles
Reference
Videos

5-Phase Stepper Motors
Network Gateways
