Brushless DC Motors & Gear Motors > Technology > 10 Standard Features for AGV / AMR Powertrain Applications
10 Standard Features for AGV / AMR Powertrain Applications
Oriental Motor offers the BLV Series brushless DC motors and dedicated drivers with features designed for battery powered material handling applications such as Automated Guided Vehicles (AGVs) or Autonomous Mobile Robot (AMRs). In this white paper, we will discuss how each of the BLV Series standard features can help make product development easier.
1. Wide Speed Ratio with Plug and Play Speed Regulation
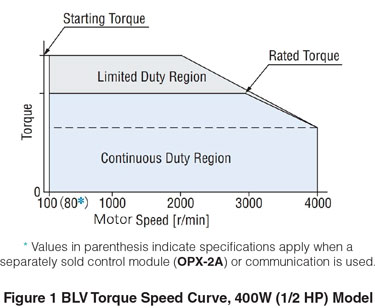
As with most brushless DC motors, a wide speed ratio is offered with our BLV Series. A continuous duty speed range of 80~4000 RPM, as shown in Figure 1, can be achieved with these motors with a speed ratio of 50:1. The BLV motor features flat torque characteristics up to rated speed which benefits AGVs/AMRs by having consistent torque performance within the rated speed range. Another advantage you may find from Oriental Motor’s brushless motors is that they feature plug & play and closed-loop feedback with their dedicated drivers. This results in a servo grade speed regulation of either ±0.5% (analog setting) or ±0.2% (digital setting). The 50:1 speed ratio along with the tight speed regulation makes these motor ideal for AGV/AMR applications.
2. Unique Compact Motor Footprint
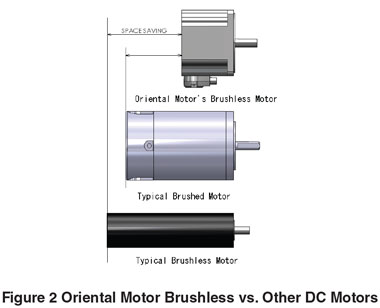
When designing AGVs/AMRs, there are space restrictions for motor placement. While most brushless DC motors in the market are offered in a long cylindrical case, other motor considerations are brushed motors which are typically larger and require brush maintenance. Oriental Motor’s brushless DC motors are offered in a unique wider frame size and shorter case length (see Figure 2). This helps free up space inside an AGV/AMR to accommodate other components or to reduce the overall size of the unit.
3. Delta Winding Offers Better High Speed Performance
The variability of speeds used on AGVs/AMRs requires the use of higher performance motors. We were able to improve our design from conventional products due to changes in the winding design. The formula below states that power is proportional to voltage times current.
P=VxI
If we want to have higher power (P) at a low voltage such as 24 VDC (V), it is necessary to increase the current (I). However, current is proportional to heat so once we increase the current, we also increase heat generation. Therefore, in order to achieve higher power with compact size, and to maintain a continuous duty rating, we needed to be a bit more creative with our winding design.
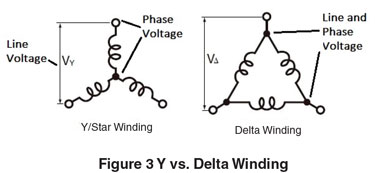
In order to drive the motor with a larger current, it is necessary to reduce resistance of the motor winding. To reduce resistance, a larger winding wire diameter was necessary. However, when designing the BLV motor with a Y winding, thicker windings proved difficult to wind. In order to reduce the winding diameter, the design is changed from a Y winding to a Delta winding. Another issue with the Y winding design is that there is a 30 degree phase difference between the line voltage and phase voltage. This is approximately 0.577 (1/√3) of the drivers applied voltage that can be applied to a single phase of the windings. The motor characteristics at high speed are proportional to the voltage and number of windings. With a Delta winding configuration, there is no phase difference between the line voltage and phase voltage. Therefore, the driver can apply its full voltage to the motor winding. This is approximately 1.732 (√3) times better at high speeds. The diameter of a Delta winding is also smaller than the diameter of a Y winding which makes it easier to wind.
What this means is that when using windings of the same specifications, a Delta winding motor can offer more high speed torque than a Y winding motor. After careful consideration, we decided to change the winding design from Y to Delta to improve high speed performance. This benefits AGVs/AMRs when requiring more torque at higher speeds.
4. Space-Saving Parallel Hollow-Shaft Flat Gearhead Offers Design Flexibility
The BLV Series motors are offered with 2 types of gearheads: a common parallel solid shaft type and a space saving parallel hollow shaft flat type (also known as the FR gearhead). The parallel solid shaft type gearhead option works for general purpose applications where there is no space constraint. Since AGVs and AMRs are designed to fit into tight spaces in order to maximize storage space, our FR gearhead can be an intriguing option because it can both reduce footprint for powertrain designs as well as increase torque without saturation.
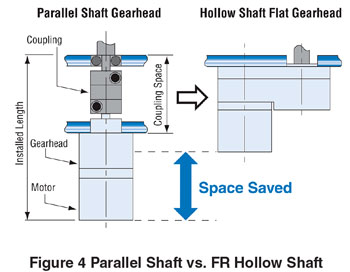
As seen in Figure 4, for parallel solid shaft gearheads, a coupling is necessary to connect the gear shaft to the drive shaft. If an FR gearhead is used, the coupling is eliminated because the drive shaft can be installed directly to the shaft of the FR gearhead. This reduces the overall length of the gearmotor.
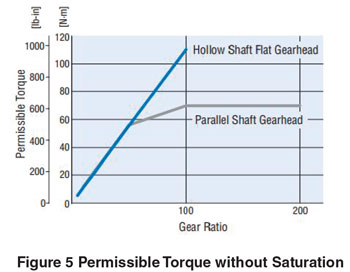
Besides eliminating the coupling, the FR gearhead also offers better performance than conventional parallel solid shaft gearheads. By designing a taller gear case, we are able to use a larger gear in the final stage of gearing. Both the larger diameter of the gear and improved rigidity of the gear case increases the permissible torque handled by the gear assembly (as shown in Figure 5). While conventional gearheads suffer from limited permissible torque due to torque saturation at high gear ratios, FR gearheads do not share this limitation. The gear case also allows for bigger bearings, which increases the permissible overhung load and life.
Purchasing the motor and the gearhead from the same manufacturer can offer some benefits. For example, specifications or drawings of the motor, driver and gear assembly can be guaranteed. When purchased together, Oriental Motor’s motors and gearheads are also preassembled for your convenience.
5. Driver Accepts Wide Battery Voltage Fluctuations
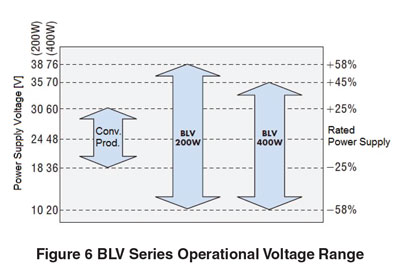
The BLV Series drivers are designed with battery powered applications in mind. The 200W (1/4 HP) version accepts 24VDC while the 400W (1/2 HP) version accepts 48VDC. Since battery voltage tend to decrease over time if used continuously, the BLV driver is designed to accept a wider range of input voltages. This can be beneficial when an AGV/AMR is low on battery power. Conventional products in the past will trigger alarms and shutdown the motor if the rated input voltage varies by ±25%. For example, the BLV 200W model can now handle ±58% of rated voltage as shown in Figure 6. This is to prevent motor downtime if the rated voltage fluctuates, and to keep the AGV/AMR unit running. The recommended rating should be within 10% of the input voltage.
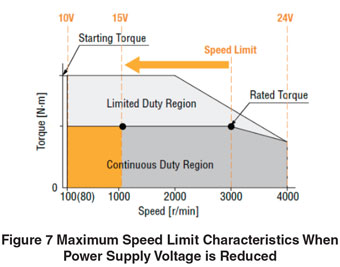
There is no change in performance when the input voltage is higher than rated voltage, but when the input voltage is lower than rated voltage by 10%, the maximum speed is automatically reduced proportionally to the input voltage. For an example of how this feature would be used, imagine an AGV or AMR’s drive wheel with a 100:1 gearmotor that is programmed to run at 30 RPM, or 3000 RPM at the motor shaft. If the input voltage drops from 24 to 15 VDC, the motor shaft speed will be reduced from 3000 RPM to 1000 RPM, which is equivalent to 10 RPM at the drive wheel. Figure 7 shows how low voltage would affect the motor’s speed torque curve. When the battery is low, this feature can be used to move the AGV/AMR to a designated recharging location instead of shutting down in its path. If this lower RPM has to be avoided, the BLV driver is also able to output a warning signal in advance before the speed is actually reduced.
6. Vector Control for Ramp Operation
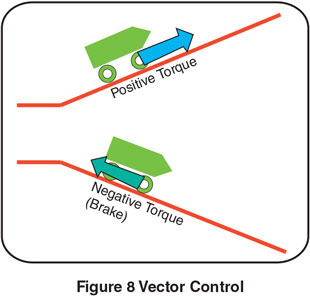
AGVs and AMRs may need to operate on a ramp. With normal brushless DC motors, speed regulation is difficult to maintain because gravity tend to overdrive the motor on its way down and increase its speed. The BLV Series is equipped with built-in “vector” control. By using “vector” control, highly accurate torque control and load factor monitoring can be achieved on an uneven surface. By monitoring and controlling torque, speed regulation can be maintained, and back EMF can be controlled effectively. Whether it’s an AGV/AMR operating on a slope or lifting a load vertically, stable speed control can be achieved with the BLV Series. A power-off-activated electromagnetic brake motor option is also available in case the motor shaft needs to be locked in position.
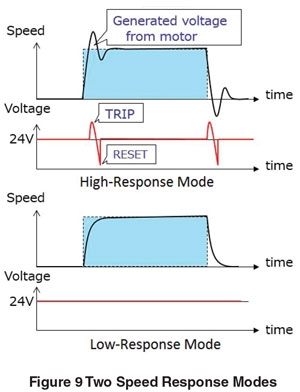
7. Speed Response Modes to Handle Back EMF
The BLV Series driver offers a feature called speed response mode to minimize back EMF. Back EMF can occur when a motor is rotated by an external force, this generates voltage that heads directly back to the driver circuit. This is important to minimize any product damage and to prevent downtime on an AGV/AMR. Speed response has 2 modes, high-response and low-response. The benefit of the speed response function is that it has a “low” setting, or “regenerative power control mode” that delays the motor response by applying a primary delay filter to speed commands. By using this setting, it is possible to reduce the back EMF impact to equipment caused by motor overshoots and sudden acceleration or deceleration. It can also help prevent the power supply from shutting down the motor due to overvoltage detection. In addition, if this mode does not completely eliminate the back EMF issue, a prolonged deceleration setting or dynamic braking (winding shortening brake) can be used. As shown in Figure 9, the high response can trip or reset the power supply causing high voltage while low response will keep the voltage levels stable. This helps to minimize downtime or product damage due to back EMF.
If the power supply or driver does not have the capability to handle the back EMF, such as an overvoltage protection, then damage could occur. If the battery or power supply has a large output capacity or overvoltage allowance then potential back EMF issues can be reduced.
8. Efficient Driver Design Reduces Operating Temperature
Heat plays a key role with electrical components in drivers which may cause components to fail. Since the dedicated driver needs to supply a large current to the motor, the driver design was also improved to sustain better low heat generation as well as better heat radiation. In order to increase power efficiency and reduce loss, the thickness of the circuit board pattern is doubled, traces are raised, and the number of through holes are increased. A semiconductor with low ON resistance is used for the inverter component of the drive to lower heat generation. Heat generation is further controlled by making the current detecting circuit resistance lower. When run at continuous duty, high power driver designs can generate a lot of heat. Therefore by introducing these design changes, heat radiation is significantly improved and the driver size can be kept compact. This is beneficial in heat reduction for AGVs/AMRs.
9. Feedback, Warning, and Alarm Functions: Know What’s Happening
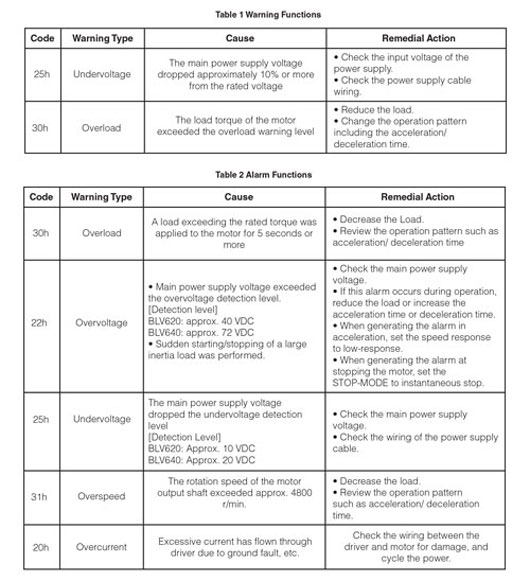
The BLV Series motors are equipped with built-in hall-effect sensors, and when used with a BLV Series driver, various parameters, warnings and alarms are available to the operator in real time. The hall-effect sensors can provide feedback information on both position and speed. Driver alarms such as overspeed can be triggered by monitoring the hall-effect sensor feedback. The difference between warnings and alarms is that motors are typically shut off during an alarm, and warnings are designed to warn the operator before alarms happen. Warnings provide an opportunity for the operator to take action and resolve the potential issue before an alarm stops operation of the motor. Warnings and alarms can be identified through a pendant type device or through an industrial fieldbus network. Tables 1 and 2 are two examples of warnings and alarms from the driver.
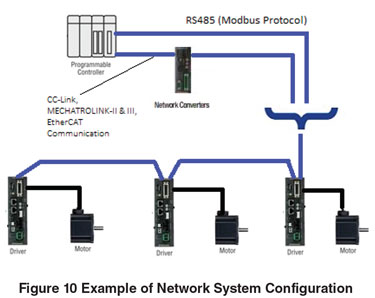
10. Network Communication Offers Connectivity Options
Stored data on the BLV Series driver, such as speed settings, acceleration/ deceleration times, and torque limits, can be set with a potentiometer, an external digital control module, or with a networked host through an industrial fieldbus network. Using network control has one distinct advantage in minimizing wiring commitments compared to I/O. Only 3 wires are required to set up an RS-485 network. The BLV Series driver is equipped with two standard RS-485 communication ports forsetting up a Modbus RTU master/slave network between a host and up to 31 devices. Having RS-485 capability built into the driver also contributes to a reduction of system components. By monitoring multiple devices from a network host, improvement of maintenance planning is possible. With our lineup of gateways, or network protocol converters, we can also able to connect to a variety of popular industrial network protocols.
Oriental Motor offers the BLV series brushless DC motors and dedicated drivers in both 200 W and 400 W with torque up to 970 lb-in. Many standard built-in features and functions are developed specifically to help advance battery powered AGV/AMR applications. The ability to operate with a wide voltage range allows operation of the motor even when voltage is lower than normal. As seen in the FR series, a hollow shaft flat type gearhead provides an alternative configuration to reduce footprint of powertrain designs. The vector control mode maintains servo grade speed regulation while operating the motor on a ramp. Back EMF issues can be reduced by using the low response mode. We also improved both motor and driver designs in order to provide a seamless plug & play product as well as guaranteed specifications. To ensure performance and to avoid oversizing, we recommend performing motor sizing calculations in order to determine the best motor for your needs. Our knowledgeable technical support group is prepared to help you calculate your exact requirements for your specific application. For more information regarding our BLV Series, please visit our website.

