Stepper Motors > Technology > 2-Phase vs. 5-Phase Stepper Motors
2-phase and 5-phase Stepper Motor Comparison
You've narrowed your search for a motion control solution down to a stepper motor. Now it's time to decide, 2-phase or 5-phase? ORIENTAL MOTOR manufactures both 2-phase (1.8°/0.9°) and 5-phase (0.72°/0.36°) stepper motors and drivers. Our experience in both technologies gives us a unique perspective. ORIENTAL MOTOR has put together a quick feature-by-feature comparison to clear up the confusion and myths of the 2-phase versus 5-phase debate. The guide covers the basic differences between both technologies in the key areas of step motor performance: resolution, vibration, torque, accuracy and synchronism. ORIENTAL MOTOR's experienced Technical Support staff are also available for more in-depth explanations of both technologies.
2-phase, 5-phase, what's the difference?
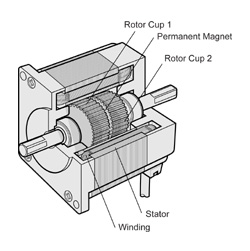
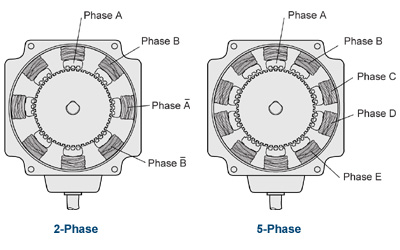
There are two key differences between 2-phase and 5-phase stepper motors. The first is mechanical. A step motor consists of basically two parts, a stator and a rotor. The rotor in turn is made up of three components; rotor cup 1, rotor cup 2 and a permanent magnet. In a 2-phase motor the stator is made up of 8 magnetic poles with small teeth, while the 5-phase motor stator is made up of 10 magnetic poles. The poles in the stator are each provided a winding.
The second difference between 2-phase and 5-phase is the number of phases. A 2-phase motor has two phases, an "A" phase and a "B" phase, while a 5-phase motor has five phases. Essentially, the number of phases refers to the different combinations of poles that are energized in sequence to attract the rotor.
2-phase and 5-phase Head-to-head
How do these differences affect performance? A number of factors are involved in the performance of a step motor. There are a number of ways to drive a stepper motor and the drive greatly affects the motor's performance. Wave Drive, Full Step, Half Step and Microstep are the most common drive methods and each offers very different performances. Without accounting for the various drive methods here are the key areas of performance for 2-phase and 5-phase stepper motors.
Resolution
Structurally, the 5-phase stepper motor is not that different from the 2-phase motor. The rotor in both motors has 50 teeth. The difference is that because the 5-phase motor has 10 poles, 2 per phase, the rotor only has to move 1/10 of a tooth pitch to line up with the next phase. In the 2-phase motor, the rotor has to move 1/4 of a tooth pitch to line up with the next phase (8 poles, 4 per phase).
This results in the 2-phase having 200 steps per rotation, 1.8° per step, while the 5-phase has 500 steps per rotation, 0.72° per step. The increased resolution of the 5-phase is inherent to its design. When coupled with a microstepping driver, the 5-phase motor can make steps as small as 0.00288°, however, position accuracy and repeatability are still subject to the motor's mechanical accuracy. The mechanical accuracy of both the 2-phase and 5-phase motor is ± 3 arc minutes (0.05°).
Vibration
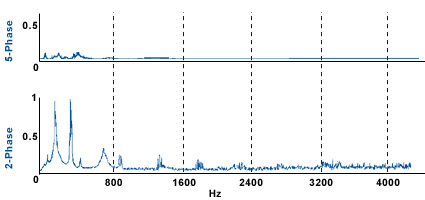
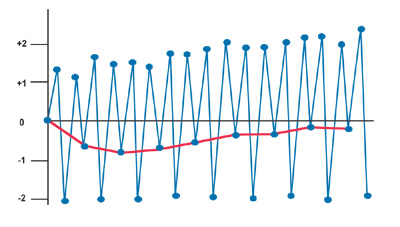
Because of the smaller step angles in 5-phase stepper motors, 0.72° versus 1.8° in a 2-phase motor, the vibration in a 5-phase motor is much less than in a 2-phase. The graph to the right shows the vibration generated from a 5-phase motor versus the vibration generated by a 2-phase stepper motor. As you can see the 2-phase motor produces much more vibration.
*The graphs to the right represent microstepping at 5K steps per rev. These graphs were created by attaching a generator to a double shafted motor. As the motor vibrates the voltage generated was graphed. The more the motor vibrated the greater the voltage generated.
Torque
While there is little difference between the output torque of a 2-phase stepper motor and a 5-phase stepper motor the 5-phase motor does have more "useable" torque. This is primarily due to the amount of torque ripple both motors produce.
Half-stepping or microstepping a 5-phase stepper motor actually increases torque by up to 10% due to more phases being energized. 2-phase motors will lose torque by up to 40% when half-stepping and microstepping, however, many 2-phase drivers compensate by overdriving the opposite torque vector.
When the stator is energized it creates an electro-magnet which attracts the magnetic flux of the rotor. The magnetic flux can be broken into two vectors, one normal and one tangential. Torque is only produced when the tangential component is present. The presence of tangential flux is depicted in the illustration below.
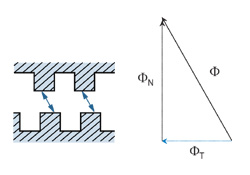
In figure 1, the rotor teeth are directly lined up with the stator teeth and the flux only has the normal component so no torque is produced. As the rotor teeth are displaced from the stator teeth in figures 2, 3 and 4 the motor produces torque. We refer to this torque as negative because the torque is trying to pull the teeth back into the stable position. In figure 5, the flux is split evenly between the stator teeth and no torque is produced. By figures 6, 7 and 8 a positive torque is created as the displaced rotor teeth move to line up with the next stator teeth. Finally, the rotor teeth line directly up with the next stator teeth (figure 1).
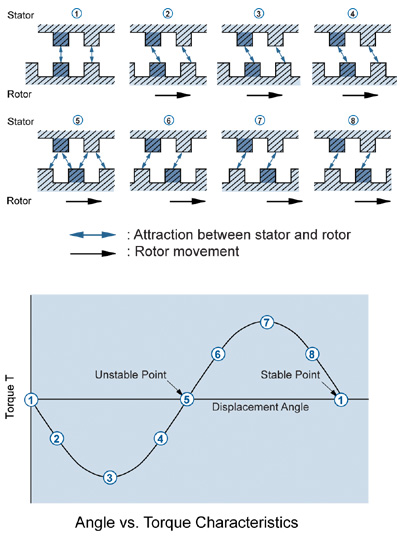
Each phase of the motor contributes the sine-shaped torque displacement curve to the total output torque of the motor (illustrated below). The difference between the peak and the valley is called the torque ripple. The torque ripple causes vibration so the greater the difference, the greater the vibration.
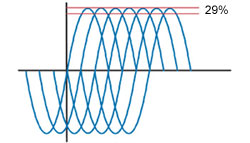
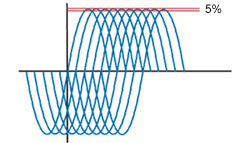
With more phases contributing to the total torque of the motor, the torque ripple in a 5-phase motor is greatly reduced over a 2-phase motor. The difference between the peak and valley in a 2-phase motor can be as great as 29%, while a 5-phase is only about 5%. Since torque ripple contributes directly to vibration the 5-phase motor runs smoother than the 2-phase.
2-Phase Torque Displacement
5-Phase Torque Displacement
Accuracy / Repeatability
Accuracy has two components, electrical and mechanical. Electrical error is caused by phases being out of balance. For example, the motor's winding resistance has a spec of ± 10%, it is possible that although the motor is rated at 10W, one phase could be 9.2W and another phase could be 10.6W. This difference between the phases would cause the rotor to align more towards one phase than another.
There are several components to mechanical error, the major one is tooth configuration. Although the teeth on a motor are supposed to be square, the stamping process and age of the die can cause some of the teeth, or portions of the teeth to be rounded. Instead of the magnetic flux flowing directly, it can flow elsewhere when the teeth are rounded. So these factors contribute to the accuracy of the motor.
Using a Full-Step drive, a 2-phase motor repeats states every 4th step, while in a 5-phase motor the states repeat every 10th step. Any electrical error caused by imbalances in the phases is negated every 4th step in a 2-phase and every 10th step in a 5-phase, leaving only mechanical error.
Once the motor completes a full 360° rotation, the same tooth is now lined up at the original starting point, eliminating mechanical error. Since a 2-phase motor takes 200 steps per revolution it is almost perfect every 200 steps, while the 5-phase motors take 500 steps per rev and are nearly perfect every 500 steps.
Synchronism
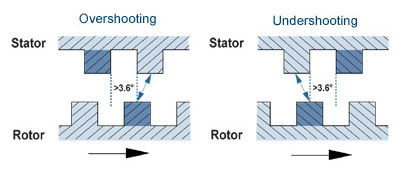
Because the 5-phase stepper motor only moves 0.72° per step it is nearly impossible for the 5-phase motor to miss a step due to overshooting/undershooting. A motor will lose synchronism or miss a step when the teeth on the rotor don't line up with the correct teeth on the stator. What will cause the teeth not align properly? First, in order for a rotor tooth to not align properly another tooth must have aligned where it was supposed to. In order for this to happen the rotor must have either overshot (went past the correct stator tooth) or undershot (not moved far enough to line up with the correct stator tooth) by more than 3.6°. Why 3.6°? Well, because the rotor teeth are magnetically attracted, the correct tooth needs to be more than halfway between the teeth on the stator to align (7.2° between rotor teeth divided by 2 gives you 3.6°). So when the rotor overshoots the correct stator tooth by more than 3.6° the next tooth will align in its place, causing you to skip a step. Conversely, if the rotor fails to move more than 3.6° the current rotor tooth will remain lined up with the stator tooth and the rotor will not rotate, meaning you missed a step.
Drive Methods
There are a number of drive methods for both 2-phase and 5-phase stepper motors. Here is a quick overview of the concepts for Full-Step and Microstepping drives.
2-Phase Full Step System (1.8°/step)
The 2-Phase Full Step system energizes both Phase A and Phase B and switches between positive and negative to create rotation.

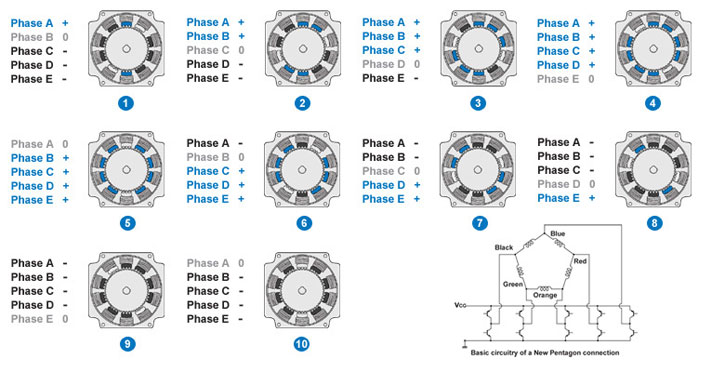
5-Phase Full Step System (Pentagon 4-Phase Excitation) (0.72°/step)
The 4-Phase Excitation System is unique to 5-Phase motors and offers more stable operation.
Microstepping
Microstep drivers divide the basic step angle of the motor by decreasing the current to one phase while increasing the current to the next phase in increments. This results in the motor taking smaller steps. With a microstep driver the motor’s basic step can be divided into smaller steps ranging from 1/1 to 1/250.
The illustrations to the right represent the basic concept of microstepping.
- Figure 1 - phase A is at 100% current so the rotor lines up directly.
- Figure 2 - the current to phase A is decreased to 75%, while 25% of the current is now in phase B.
- Figure 3 - the current for both phase A and B is 50% so the rotor lines up directly in the middle of the two.
- Figure 4 - phase A is now at 25% and phase B is at 75% so the rotor moves closer to phase B.
- Figure 5 - phase A is turned off and phase B is at 100% so the rotor finally lines up directly with phase B.

By microstepping the motor in this example we have divided the basic 500 steps per revolution of the 5-phase stepper motor by 5, increasing it to 2,500 steps per revolution. The resolution of the motor is now 0.144°.
Microstepping not only provides a higher resolution, it also ensures smoother operation, lower vibration and less noise than other drives.
Conclusion
Depending on your particular application, a 2-phase motor may suffice. However, 5-phase stepper motors offer higher resolution, lower vibration, higher acceleration and deceleration rates (due to smaller step angles), and are less likely to lose synchronization due to overshooting/undershooting than a 2-phase stepper motor. For applications requiring high precision, low noise and low vibration, 5-phase is the better technology.
Want to learn more?
ORIENTAL MOTOR's Technical Support Team and Application Engineers will work with you to determine the best solution for your application. 2-Phase, 5-Phase, Full-Step, Microstep? ORIENTAL MOTOR's experienced team members know the technology inside and out. We'll find the right solution based on your needs and explain the alternatives. Call 1-800-GO-VEXTA (468-3982) to speak with an ORIENTAL MOTOR Technical Support Team Member.
2-Phase Bipolar Stepper Motors

5-Phase Stepper Motors

2-Phase Bipolar Stepper Motor Drivers

5-Phase Stepper Motor Drivers