Products
Solutions
Technical Information
Motor Sizing
Downloads
Contact Us
Industrial Robots > Small Robots OVR > OVR Series Articulated Robots
OVR Series Articulated Robots

OVR Series Articulated Robots
The OVR Series Articulated 4-axis, 5-axis, and 6-axis small horizontal transport robots feature a simple mechanism that can be easily controlled and constructed cost-effectively. The OVR Series Articulated 4-axis, 5-axis, and 6-axis small horizontal transport robots. Articulated Robots utilize rotary joints (axis) that allow for more degrees of freedom than other robots types. Articulated Robots structure provide an enhanced range of motion meant to mimic a human arm. This allows a lot of flexibility in the applications they can support in manufacturing and industrial applications. Control with the MRC Series controller and AZ Series motor drivers.
- Parallel link mechanism
- Transportable mass 1 ~ 5 kg
- Compact and lightweight
- Can be combined with an electric linear slide for horizontal travel (5-axis and 6-axis)
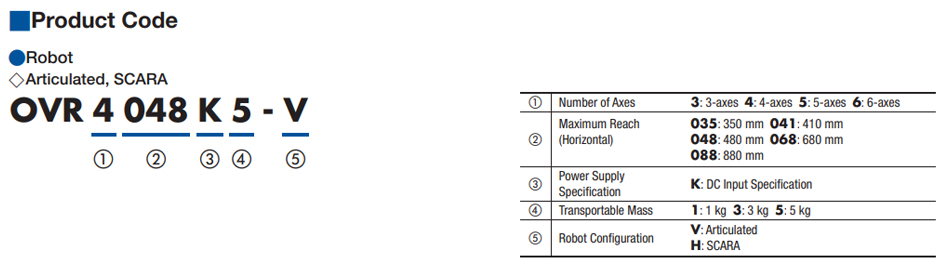
Robot Lineup
Articulated Robots |
Number of Axes |
Maximum Reach (Horizontal) |
Transportation Mass |
Power Input |
|---|---|---|---|---|
 |
480/680/880 mm |
5 kg |
24 VDC |
|
 |
350 mm |
1 kg |
24 VDC |
|
 |
480 mm |
1 kg |
24 VDC |
Articulated Robots
Articulated Robots utilize rotary joints (axis) that allow for more degrees of freedom than other robots types. Articulated Robots structure provide an enhanced range of motion meant to mimic a human arm. This allows a lot of flexibility in the applications they can support in manufacturing and industrial applications. These robots are the most common robot type used in industrial applications because they can perform many different types of tasks with high precision and speed.
Oriental Motor offers 4, 5 or 6-axis robots that can utilize a wide range of end effectors to meet your specific application needs. In addition, our MRC robot controllers and MRC Studio Software allow for simple control and performance in a complete robot solution.
4-axis |
|
Parallel Link Mechanism |
|---|---|---|
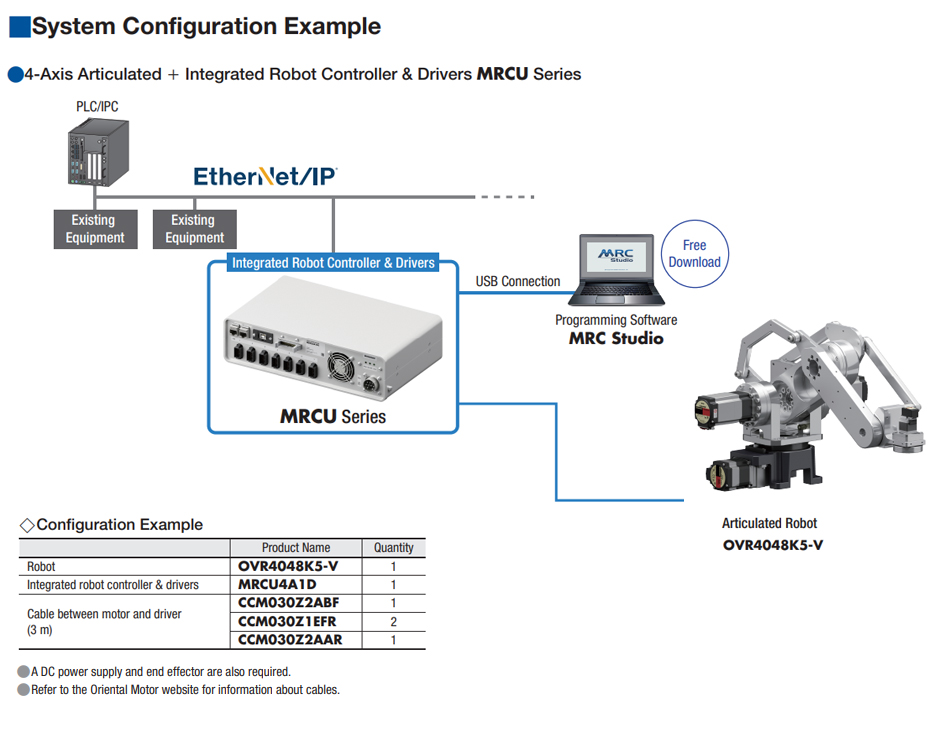
OVR4048K5-V |
|
5-axis |
|
Compact and Lightweight |
|---|---|---|
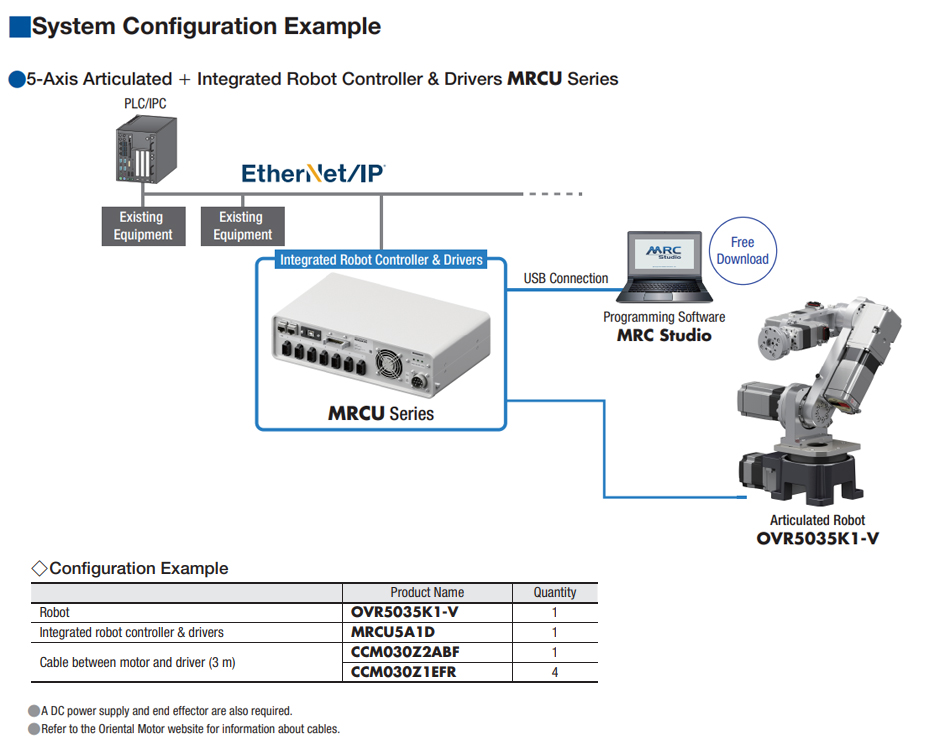
OVR5035K1-V |
|
6-axis |
|
Approach the Load from Various Angles |
|---|---|---|
OVR6048K1-V |
|
Built-in Battery-Free Absolute Encoder
| The αSTEP AZ Series (DC input) is used for all axes. No external sensors are required, simplifying the wiring. No battery is needed, so maintenance can be reduced. | 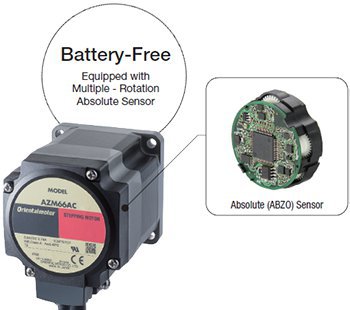 |
|---|
Easy Maintenance

Some motors can be replaced by the customer. This cuts down on the burden of maintenance (both cost and time) after deployment.
*Oriental Motor also replaces motors during maintenance. Please contact your nearest Oriental Motor sales office.
Customizable

The arm length of a 4-axis articulated robot can be customized according to the customer's application.
(Variable reach length: 580 mm, 780mm)
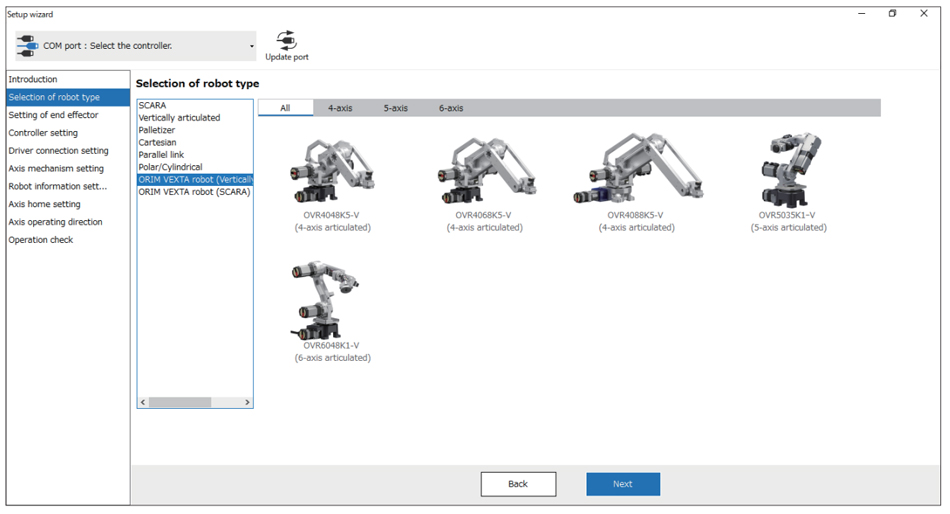
Easy Setup Quickly
Easy Setup, Even for Beginners
Small robots OVR can help reduce setup time because dimensional data, such as arm length, is already registered.
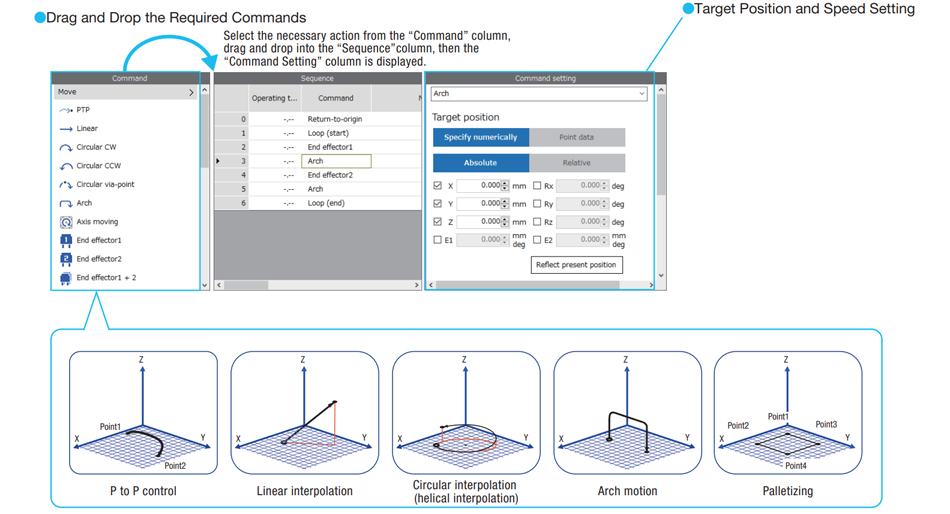
Say Goodbye to Ladder Logic! Operation Programming with Item Selection
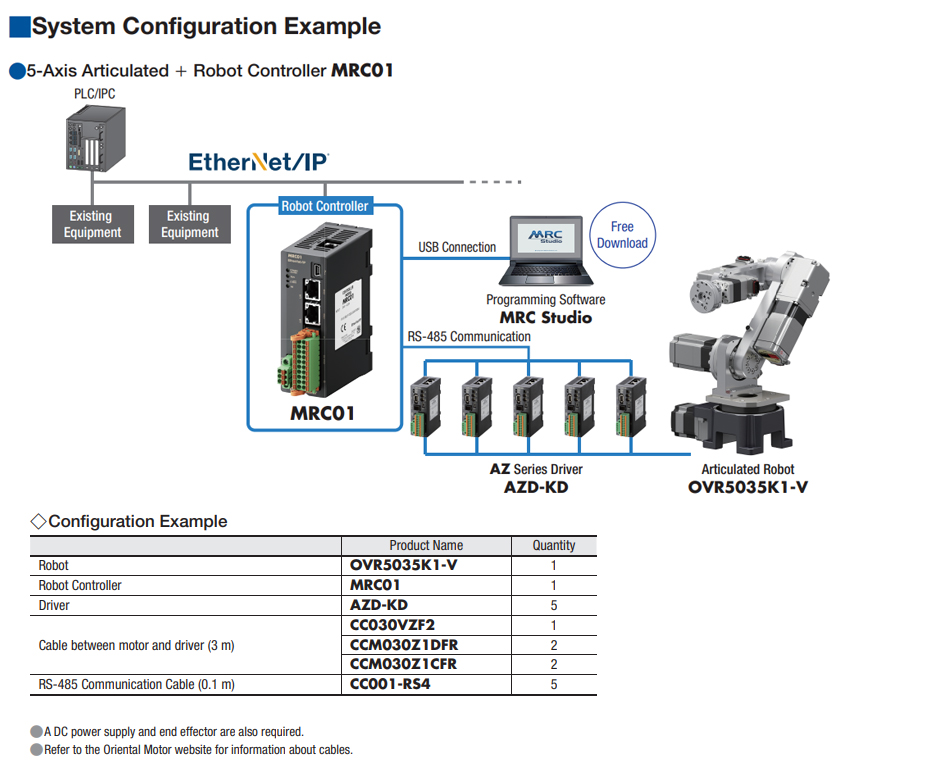
Program creation uses a simple command selection format. Programs can be created intuitively, without requiring specialized knowledge such as ladder diagrams. The system supports a range of advanced motion control operations, including P-to-P, linear interpolation, circular interpolation, and arc motion, among others. Operating data is executed directly from a host controller via EtherNet/IP
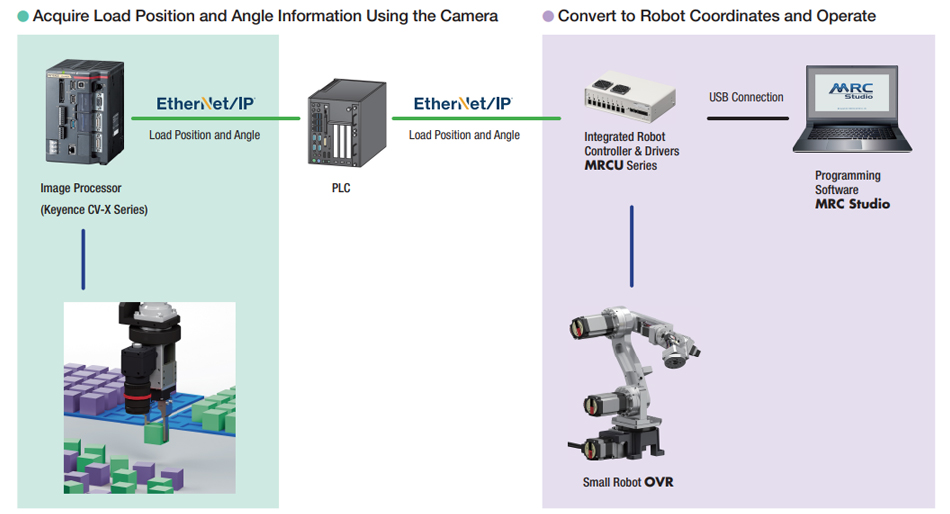
Configuration of a Robot Vision System Using 2D Cameras
The robot controller is equipped with useful functions for operating the robot using load position and angle information acquired by the camera.
In order to integrate the 2D camera, MRC Studio is used to perform the calibration* in advance. The settings can be easily configured by simply following the on-screen instructions while looking at the illustrations, allowing for a reduction in the work hours necessary for correction.
*Up to two motors
Simple Control with a Robot Controller
Knowledge of "Networks", "Ladder Programs", and "Kinematics operations" is needed to run robots.
OVR utilizes a robot controller, making it easy to start up and control the robot, even without robot control experience. 
Product Line
|
|
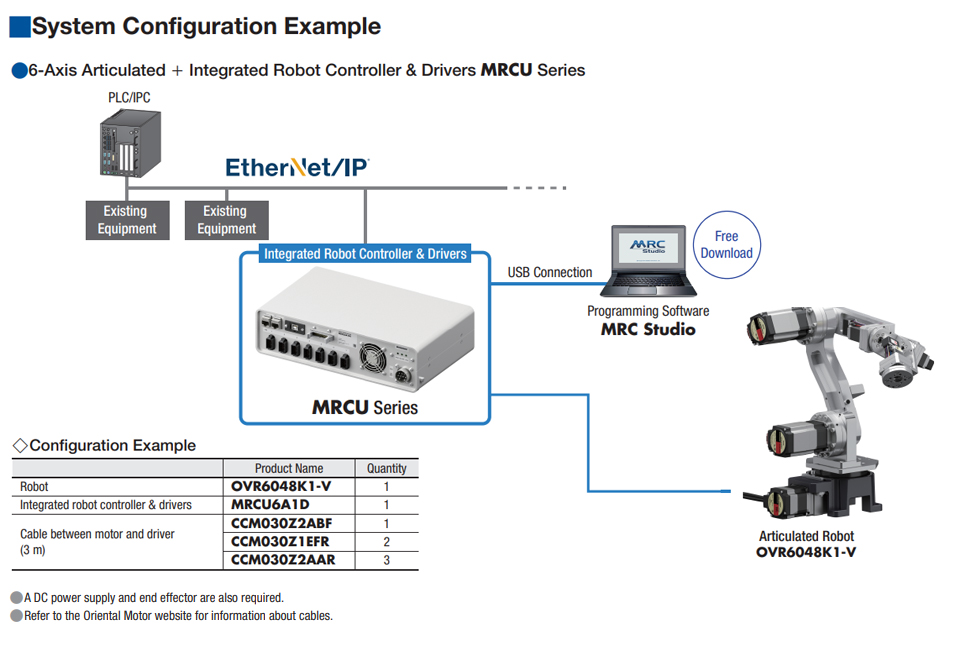
Integrated Robot Controller & Drivers |
|
MRCU Series |
|
Robot Controller |
|
MRC01 |
|
Easy Setup with MRC Studio Programming Software
 |
|
|---|
MRC Reality (AR App for Mobile)

We have an iPhone/iPad app that allows a robot to be seen in real space to simulate its operation. This simulator allows you to make the small robot OVR appear in the actual space and check its size and range of motion. Please use it to check the size and mechanism movement that are difficult to grasp from catalog information alone. Please contact our technical support for the details.
Use your smartphone or tablet
Download here for free

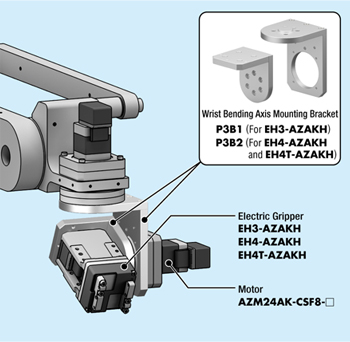
End Effector
The EH Series of electric grippers equipped with the αSTEP AZ Series can be controlled as an end effector by the robot controller. 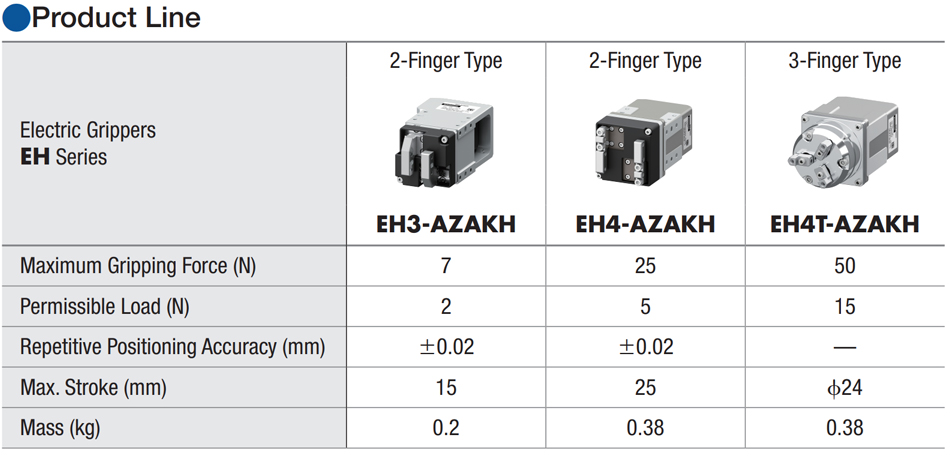
Applications
The EH Series of electric grippers equipped with the αSTEP AZ Series can be controlled as an end effector by the robot controller.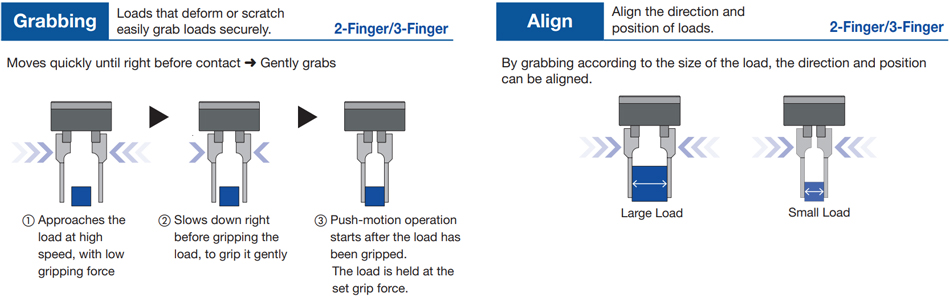
Fine Gripping Force Control
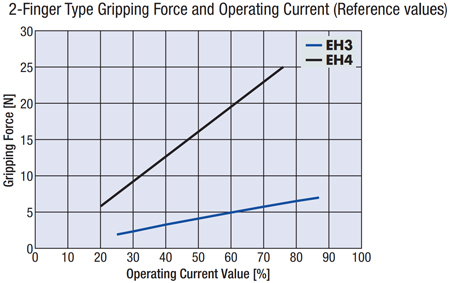
Fine current control allows the gripping force to be finely changed and adjusted.
Grips everything from delicate parts to slippery loads appropriately, gently or firmly as needed.
Wrist Bending Axis Mounting Bracket (for 4-Axis Type)
Since the 4-axis vertically articulated robot is designed with the end-effector always facing down, only 4 axes are required for pick-and-place operations. To add an axis to change the rotational angle of the end-effector, use the Wrist Bending Axis Mounting Bracket with an AZ Series CSF geared type motor and an EH Series gripper.
Product Name |
|---|
P3B1 (For EH3-AZAKH) |
P3B2 (For EH4-AZAKH, EH4T-AZAKH) |
Connection Cables
Contact technical support

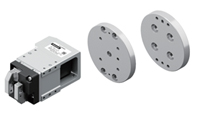
Robot Flange Adapter
Articulated end effector mounting conforms to ISO 9409-1-31.5-4-M5.
The EH Series of electric grippers can be mounted using the robot flange adapter.
Product Name |
|---|
P3F1 (For EH3-AZAKH) |
P3F2 (For EH4-AZAKH, EH4T-AZAKH) |
System
Let's Make Automation Work for You!
OVR Series Robot Support Lab
At the Robot Lab, you can experience hands-on testing using your own workpieces and go through the entire planning process from robot controller setup to programming. You can also see demonstrations of articulated and SCARA robots. Online consultations are available via PC or smartphone.
Chicago Lab Contact Information |

What You Can Do at Robot Lab
Proof of Concept
We can conduct transport tests using your workpiece and end effector to verify if operation is possible. We can perform detailed verification, including checking if the desired operating speed and trajectory are achieved, providing consultations on gripper design, and robot sizing. In addition, we can help address any other concerns you may have about introducing robots into your operations.
Demonstration (On-site/Remote)
We are exhibiting typical industrial robots, including "articulated robots" and "SCARA robots," as well as composite demonstration units combining these types.

Training Support
We offer training for OVR small robot operation, the MRC01 robot controller that allows for easy robot control, and the MRC Studio programming software. We offer product and programming consultations.

Need Help Starting Your Automation Project? We're Here for You
Need a hand getting your automation project off the ground?
Our team of robot automation experts are ready to guide you - whether you're just starting out or looking to optimize an existing setup.
Book a free session with us to get your questions answered and discover the best solution tailored to your application.
OVR Robot Case Study
Videos

Product Brochure

MRCU Integrated Robot Controller & Drivers
EL Series Electric Lifting Columns

On Demand Webinar
